Beam Climbing Soft Robot
Most air actuated soft robots rely on hard control components to generate and control the airflow that governs their movement. However, limits the compliance, simplicity and affordability of these soft robots.
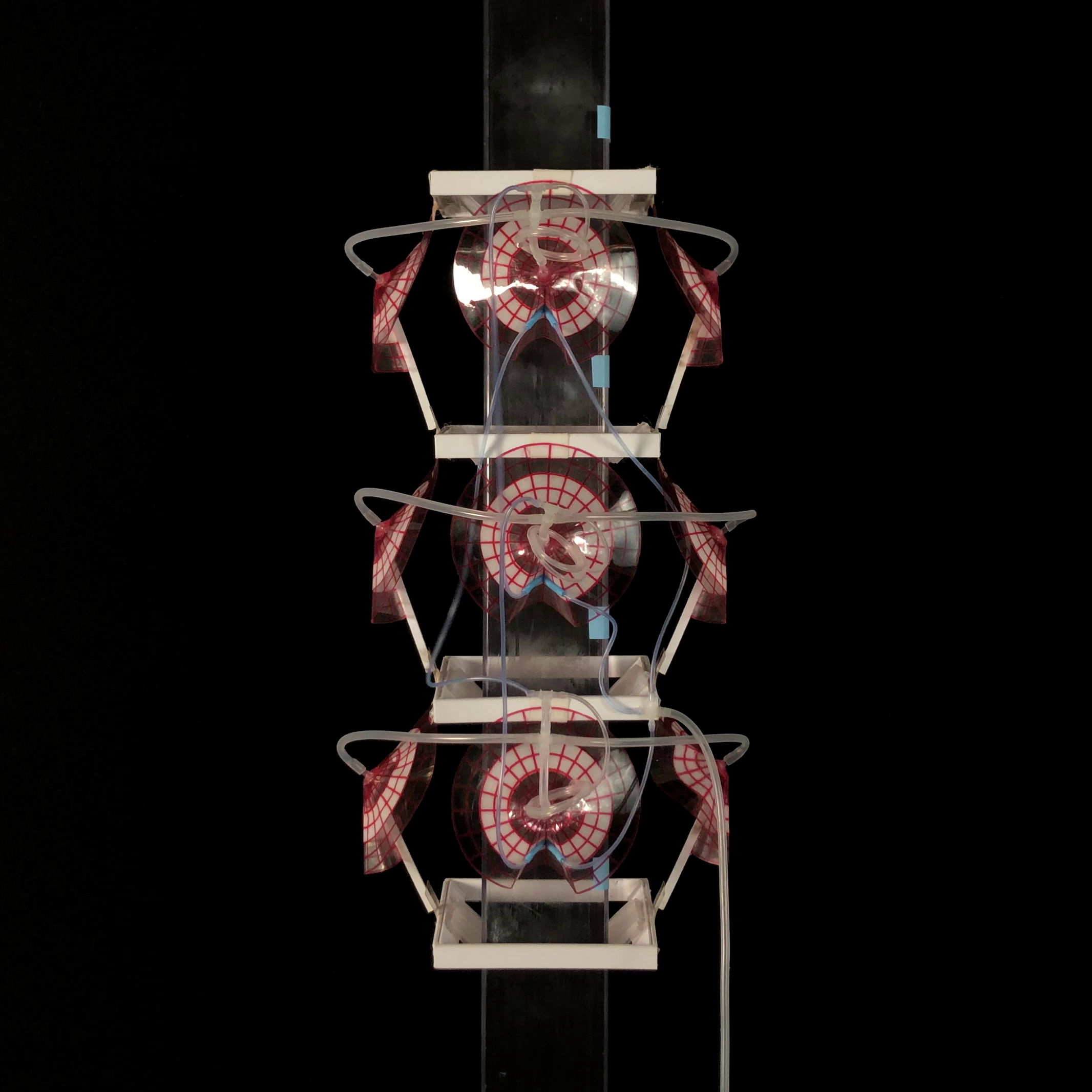
At the Harvard SEAS Research Experience for Undergraduates, I designed and built a soft, beam climbing robot that does not rely on hard components to generate control signals. It utilizes a soft ring oscillator previously created in the lab. The oscillator transforms a single constant pressure input and outputs three oscillating outputs. My work helped demonstrate how this ring oscillator could be used to control a robot performing useful tasks like basic cleaning and maintenance
Paper
Won-Kyu Lee, Daniel J. Preston, Markus P. Nemitz, Amit Nagarkar, Arthur K. MacKeith, Benjamin Gorissen, Nikolas Vasios, Vanessa Sanchez, Katia Bertoldi, L. Mahadevan, and George M. Whitesides. Science Robotics. 2022.